












HuroCup(全能人形機器人)
為了縮短全自主人形機器人研發的學習曲線,技術發展委員會已經發展幾項挑戰:
(1) 來回快跑(Sprint)
(2) 足球罰踢(Penalty Kick)
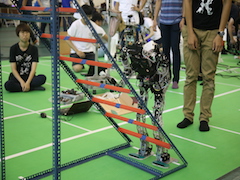
(3) 綜合競技(Spartan Race)
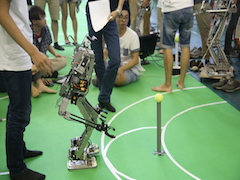
(4) 射箭(Archery)
(5) 舉重(Weight Lifting)
(6) 籃球投籃(Basketball)
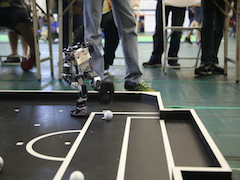
(7) 避障(Obstacle Run)
(8) 跳遠(Long Jumping)
(9) 馬拉松(Marathon) 整個挑戰的目標是發展可適應各種困難環境中的全自主全能人形機器人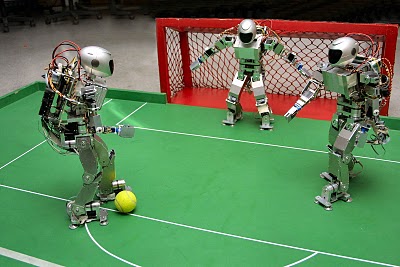 以下是所有比賽規則 ( 為與國際接軌 ) ,規則保持通則
以下是所有比賽規則 ( 為與國際接軌 ) ,規則保持通則
(2) 足球罰踢(Penalty Kick)
(3) 綜合競技(Spartan Race)
(4) 射箭(Archery)
(5) 舉重(Weight Lifting)
(6) 籃球投籃(Basketball)
(7) 避障(Obstacle Run)
(8) 跳遠(Long Jumping)
(9) 馬拉松(Marathon) 整個挑戰的目標是發展可適應各種困難環境中的全自主全能人形機器人
以下是所有比賽規則 ( 為與國際接軌 ) ,規則保持通則- 通則(General Laws)
- 組織規則( Orgnizational Laws )
- 所有項目規則 ( All Round Laws )
- Sprint( 來回快跑 ): 來回快跑項目是一個人形機器人短距離跑步。 這一比賽的目的是發展機器人儘可能快速行走的步態。
- Penalty Kick ( 足球罰踢 ): 在這比賽項目中,足球放置於一個區域內的任一位置,機器人必須能接近球並將球踢進球門,其他隊伍的機器人將輪流擔任守門。
- Archery( 射箭 ): 這個項目是鼓勵研究機器人精準的使用順應性力。
- Weight Lifting( 舉重 ): 這個比賽項目的目的是研發人形機器人能舉起重量且能平衡的支撐者。
- Basketball( 籃球投籃 ): 目前籃球比賽是單一機器人,未來希望能擴展成多個和機器人的比賽,人形機器人能將球投入有顏色的籃框。
- Obsataclec Run ( 避障 ): 這個比賽的項目類似於來回快跑在此機器人行走速度,但是機器人行走在一有障礙的空間。機器人必須從一端儘快的避開障礙物走到另一端。
- Long Jump( 跳遠 ): 這個項目是鼓勵機器人的動力學,以創造強大的力,並利用順應性力,使機器人跳後可以順利站立。
- Marathon( 馬拉松 ): 馬拉松的行走距離去年為84.39公尺 今年會再增加,跑道是有顏色的軌道。